3D激光视觉寻位系统
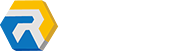
3Dレーザービジョン測位システムは主に3Dレーザー、産業用コンピューターとビジョンソフトウェアからなり、ロボットが3Dレーザーを所定の位置に持ち込んで写真を撮影し、ビジョンソフトウェアによって画像演算が行われて、得られたワークの偏差値をロボットに送信し、ロボットが自動的に偏差を修正した後、最終的にワークを正確に掴み取るよう誘導します。3Dレーザーには3Dレーザー機能と2D撮影機能が含まれます。3Dレーザー機能は、三角光切断原理に基づき、線形レーザービームを利用して測定された特徴の高さ、傾斜および回転量を取得し、2D撮影機能と組み合わせて特徴の中心を決めることで、標準ワークに対する対象ワーク全体の偏差値を求めます。当該システムのレーザー局所イメージングは、通常、複数台が必要とし、さまざまな生産ラインの超大型ワーク(例えば、自動車のサイドパネル)の材料搬送、掴み取るなどのプロジェクトニーズに適しています。