



製品機能:
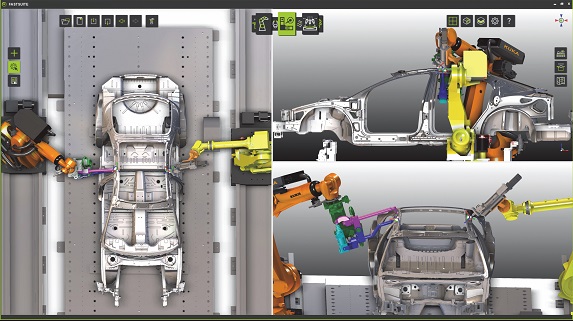
ロボット及び数値制御装置のシミュレーションオフラインプログラミング仮想デバッグ
関連パラメータ:
豊富なデータインタフェース:
CAD:CATIA,NX,STEP,JT,IGES,Parasolid,SolidWorks.
レイアウト:AML、PLM、XML.
工程データ:PMI(JT)
豊富なリポジトリ、迅速なソリューションの数モデルの作成:各ブランドのロボット、物流設備、周辺、外部軸、変位機、マンマシンモデルなど。
異なる応用に対して開発された専門技術パッケージ:スポット溶接、ロールエッジ、アーク溶接、レーザー切断、シール、接着剤塗布、スプレー、リベットなど。
カスタマイズ可能性、柔軟な機能開発:API、CLI拡張カスタマイズ、Python。
CAD:CATIA,NX,STEP,JT,IGES,Parasolid,SolidWorks.
レイアウト:AML、PLM、XML.
工程データ:PMI(JT)
豊富なリポジトリ、迅速なソリューションの数モデルの作成:各ブランドのロボット、物流設備、周辺、外部軸、変位機、マンマシンモデルなど。
異なる応用に対して開発された専門技術パッケージ:スポット溶接、ロールエッジ、アーク溶接、レーザー切断、シール、接着剤塗布、スプレー、リベットなど。
カスタマイズ可能性、柔軟な機能開発:API、CLI拡張カスタマイズ、Python。